Руководство пользователя
Назначение
Беспроводной перезаряжаемый центроискатель WLR предназначен для определения точных координат предметов, установленных на фрезерном станке с числовым программным управлением (ЧПУ) контактным способом. ЧПУ система формирует эти координаты в момент касания предмета стилусом датчика и использует их для привязки программы обработки к расположению заготовки, для вычисления длин, диаметров, для поиска центров отверстий и т. д.
Прибор может использоваться с LinuxCNC, Mach3 и другими ЧПУ системами. Связь центроискателя с приемником осуществляется с помощью радиосигнала 2,4 ГГц, далее приемник соединяется проводом с ЧПУ системой. Передатчик встроен внутрь центроискателя, а приемник поставляется в комплекте в виде отдельного устройства.
Характеристики WLR v9
- 1. Однонаправленная повторяемость: 0.001 мм.
- 2. Контакты: Шариковые контакты из карбида вольфрама.
- 3. Свободный ход стилуса: (X,Y) ±10 мм, (Z) -7 мм.
- 4.Питание: Использована литий-ионная аккумуляторная батарея LIR2477 3.6В, при этом напряжение на контактной группе динамически увеличивается до 16В для надежного замыкания контактов.
- 5. Сверхнизкое потребление тока центроискателем:
- 0,4 мА при работе (реализована непрерывная радиосвязь);
- 0,02 мА в спящем режиме;
- 0 мА, когда кнопка питания выключена.
- 6. Датчик вибрации: позволяет выйти из спящего режима встряхиванием или вращением в шпинделе от 200 об/мин.
- 7. Защита: от брызг (СОЖ) и пыли.
- 8. Возможности радиоприемника:
- - Обеспечивает нормально замкнутую связь с центроискателем (непрерывная радиосвязь путем приема коротких пакетов сигналов с частотой от 2 до 5 раз в секунду). Надежность обеспечивается протоколом с подтверждением приема и дублированием данных.
- - Задержка радиосигнала составляет 0,75 мс, общая задержка во всей цепочке (от контактов до вывода OUT) составляет 1,5 мс.
- - Индикация уровня радиосигнала при каждом нажатии стилуса.
- - Индикация уровня заряда батареи.
- - Автоматический поиск лучшего из 16 поддиапазонов 2,4 ГГц при включении или пробуждении.
- - Возможность подключения приемника к источникам питания в широком диапазоне +5В...+24В на входе и на выходе.
- - Возможность выбора различных схем подключения к ЧПУ контроллеру: NPN-PNP, NC-NO.
- - Вход для NPN-NC или NC датчика инструмента.
- - Возможность установки режимов сна с помощью DIP-переключателей.
- - Детектор задержек более 1,7 мс и вывод предупреждения на выход ERR.
- - Светодиодная и звуковая индикация срабатывания датчика, светодиодная индикация сигнала ошибки.
- - Защита от коротких замыканий выходов на питание или землю, защита от переполюсовки питания.
Технические характеристики
14 мА (9В)
12 мА (12В)
8 мА (24В)
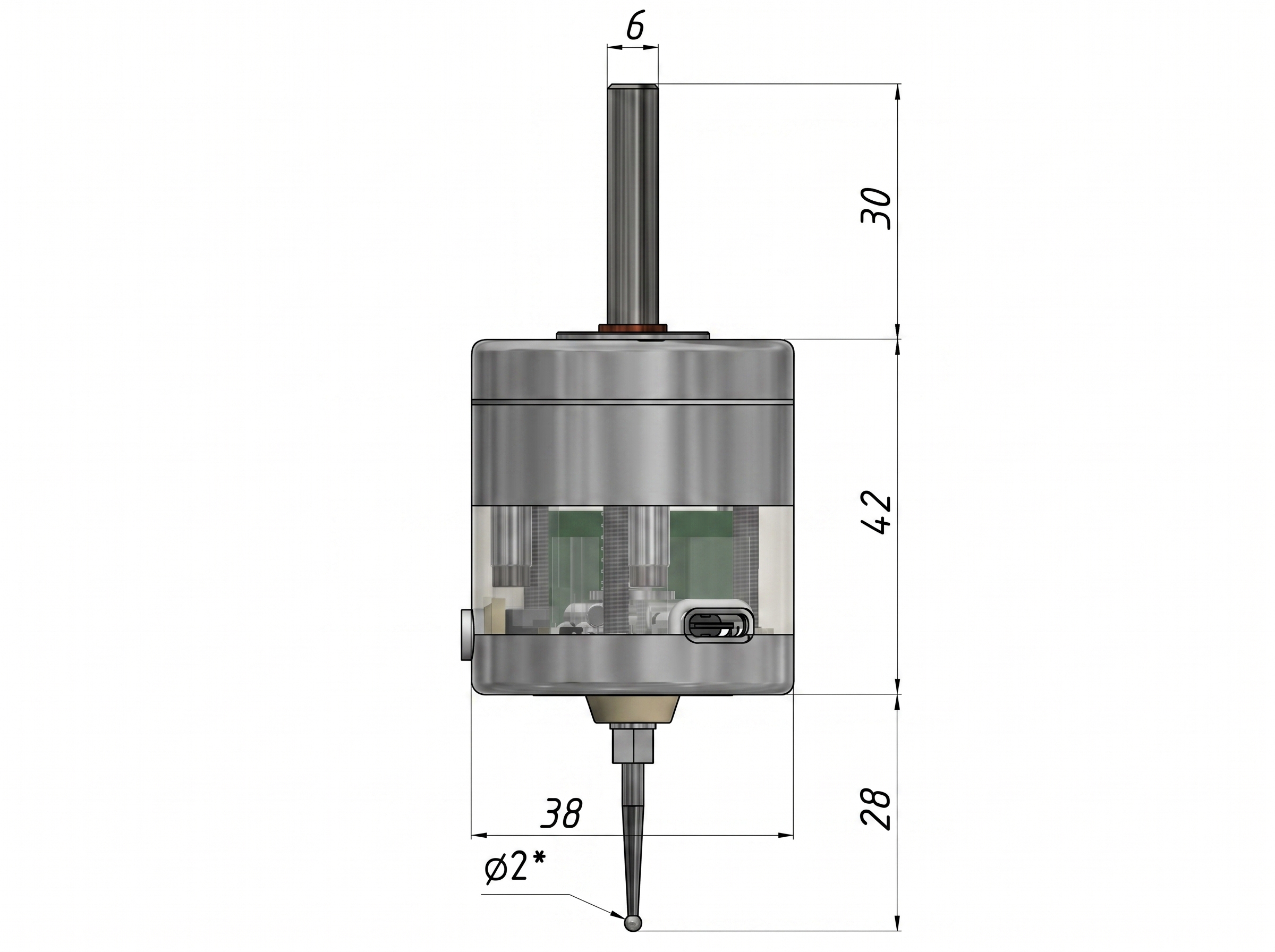
* Все размеры - для справки. Диаметр шарика (наконечника стилуса) указан ориентировочно, фактически может отличаться от указанного в пределах ±0.01мм, сферическая неравномерность < 0.001 mm.
Подключение
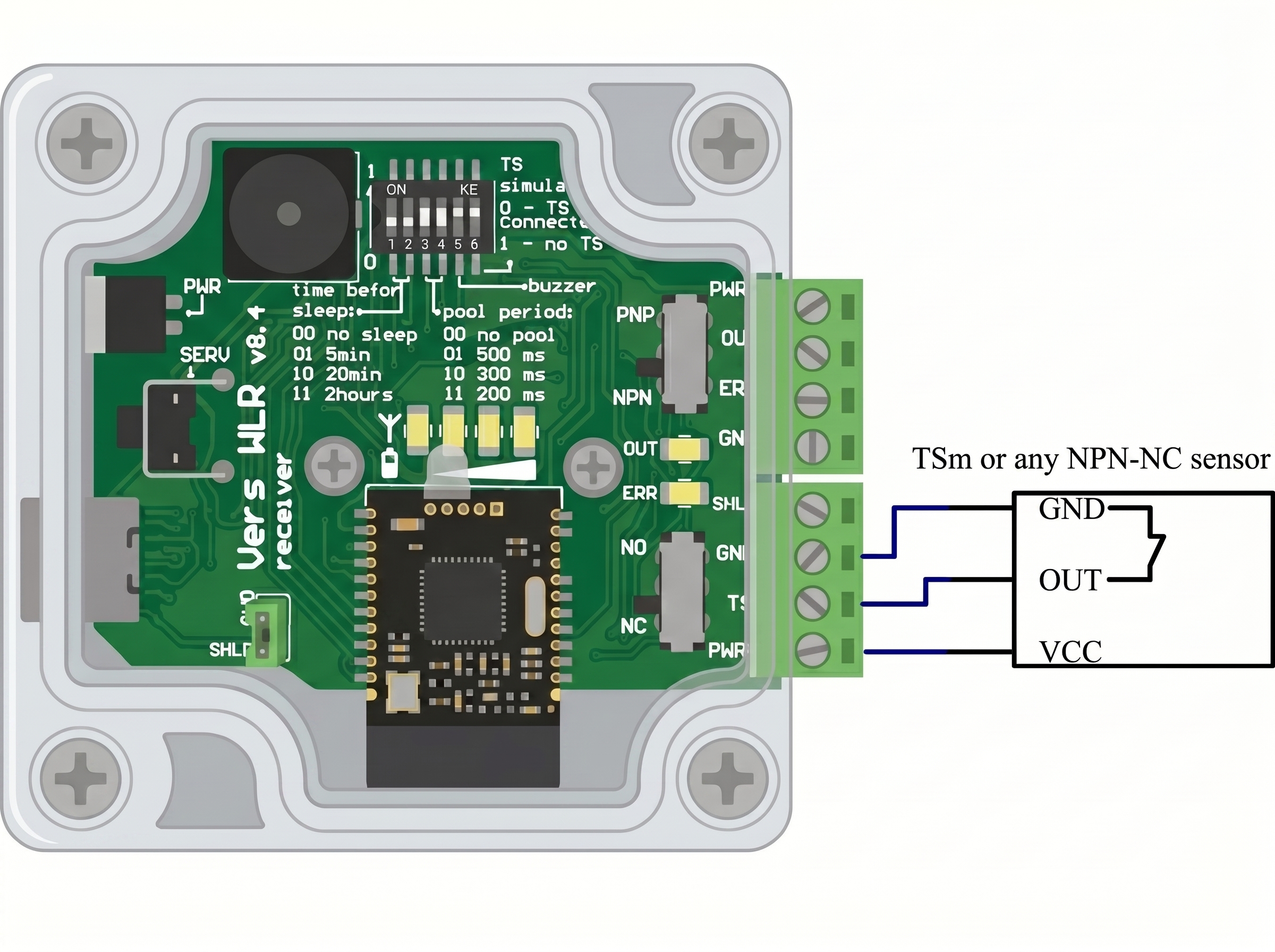
Функции переключателей и распиновка разъёма приёмника.
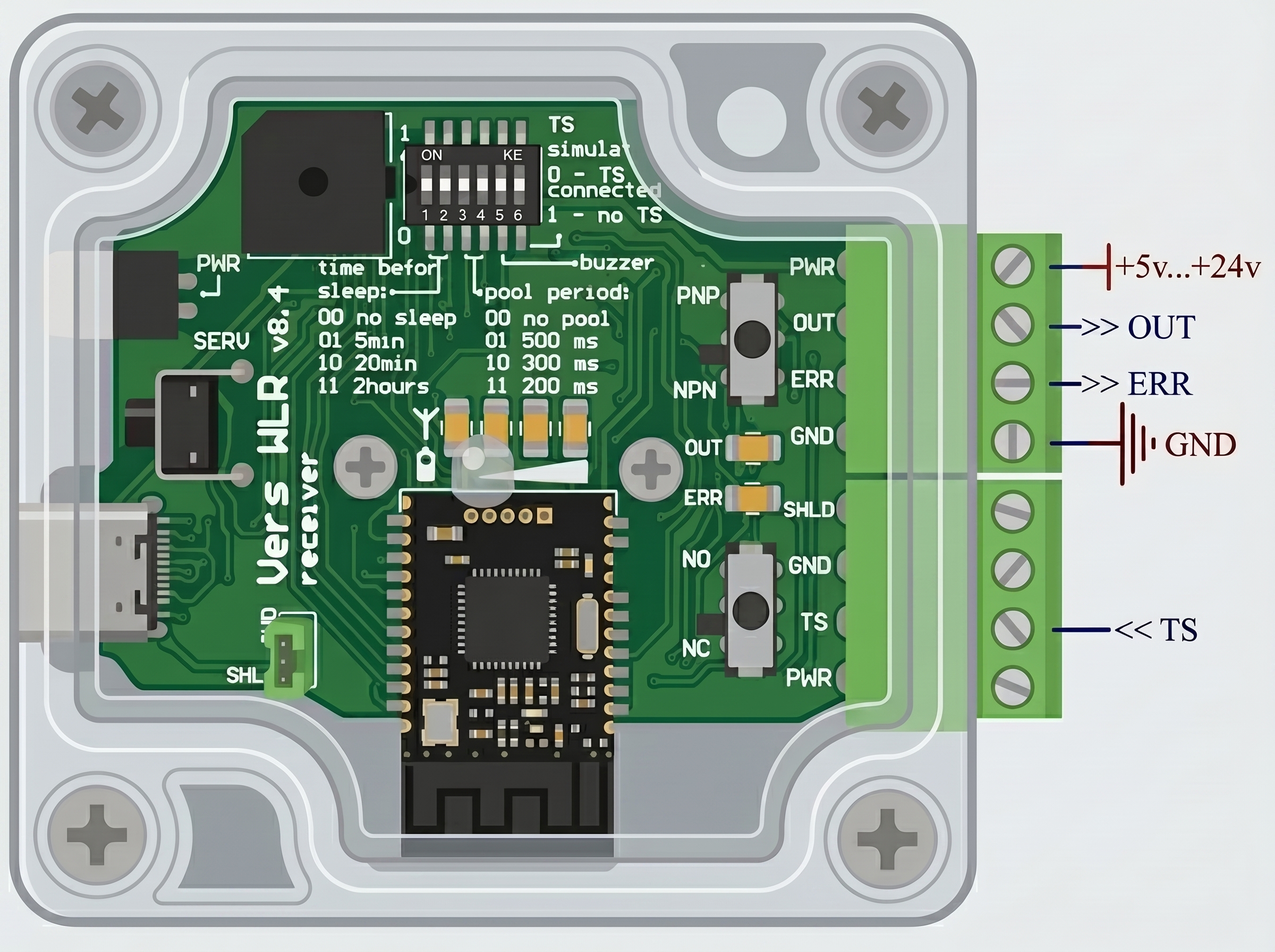
«Время до сна» (Time before sleep) задает интервал бездействия центроискателя, через который центроискатель автоматически перейдет в Спящий режим 1. Выход из такого спящего режима – встряхиванием или вращением в шпинделе от 200 об/мин, но не более 1500 об/мин.
"TS simulate" Если вы не используете вход TS, то этот переключатель должен быть включен. Переключатель соединяет на постоянно вход TS с землей. Если вы решите использовать вход TS, то переключатель "TS simulate" нужно выключить, а также произвести процедуру "Storing PARAMETERS" (см. ниже описание кнопки "SERV").
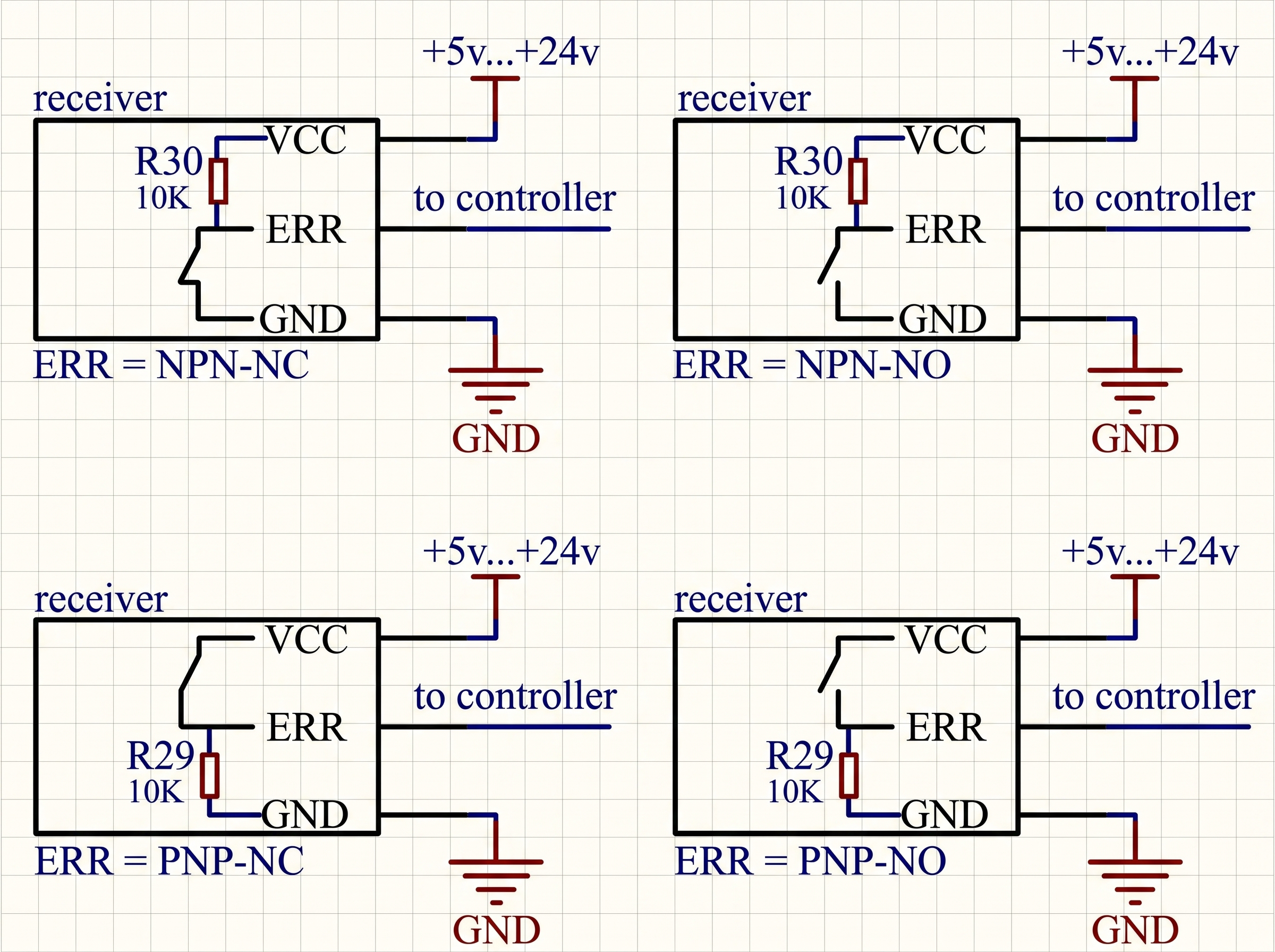
"ERR" — это логический выход, который сигнализирует о чрезмерных (более 1,7 миллисекунды) задержках. Сопровождается LED индикацией в приемнике. Предоставляет возможность отменить некорректное измерение в случае возникновения задержки отклика радиоканала. Задержка возникает когда в момент нажатия стилуса ещё отправлялся короткий пакет подтверждения связи, задержка может составить до 12ms. Вероятность такого события в зависимости от заданного пользователем периода пакетов подтверждения связи (poll period): 0.3c - 3.6%, 1c -1.2%, 3c - 0.4%. Программная проверка Сигнала ошибки ставится сразу после поиска G38 (linuxcnc), G31 (mach3), до отпускания стилуса, в случае выявления Сигнала ошибки измерение рекомендуется провести заново. Как вариант, можно ERR не использовать, тогда для полной уверенности в измерении проводить измерение одного места дважды и принимать, если оба замера совпали с требуемой точностью. Также, если проводить уточняющее измерение на скорости <10 мм/мин, погрешность от максимально возможной задержки составит <0,002мм, в некоторых случаях этого может быть достаточно. Также ERR используется для определения необходимости вывести центроискатель из Спящего режима 1. Тогда для пробуждения: в ручном режиме - встряхивание, в автоматическом режиме - программная проверка Сигнала ошибки выполняется перед поиском G38 (linuxcnc), G31 (mach3), в случае выявления Сигнала ошибки ERR необходимо произвести вращение в шпинделе 200 - 1500 об/мин. Для работы с сигналом ERR в вашем ЧПУ контроллере должен быть выделен 1 свободный цифровой вход который может быть считан на уровне программ.
«Buzzer» активирует звуковой сигнал сработки ЦИ.
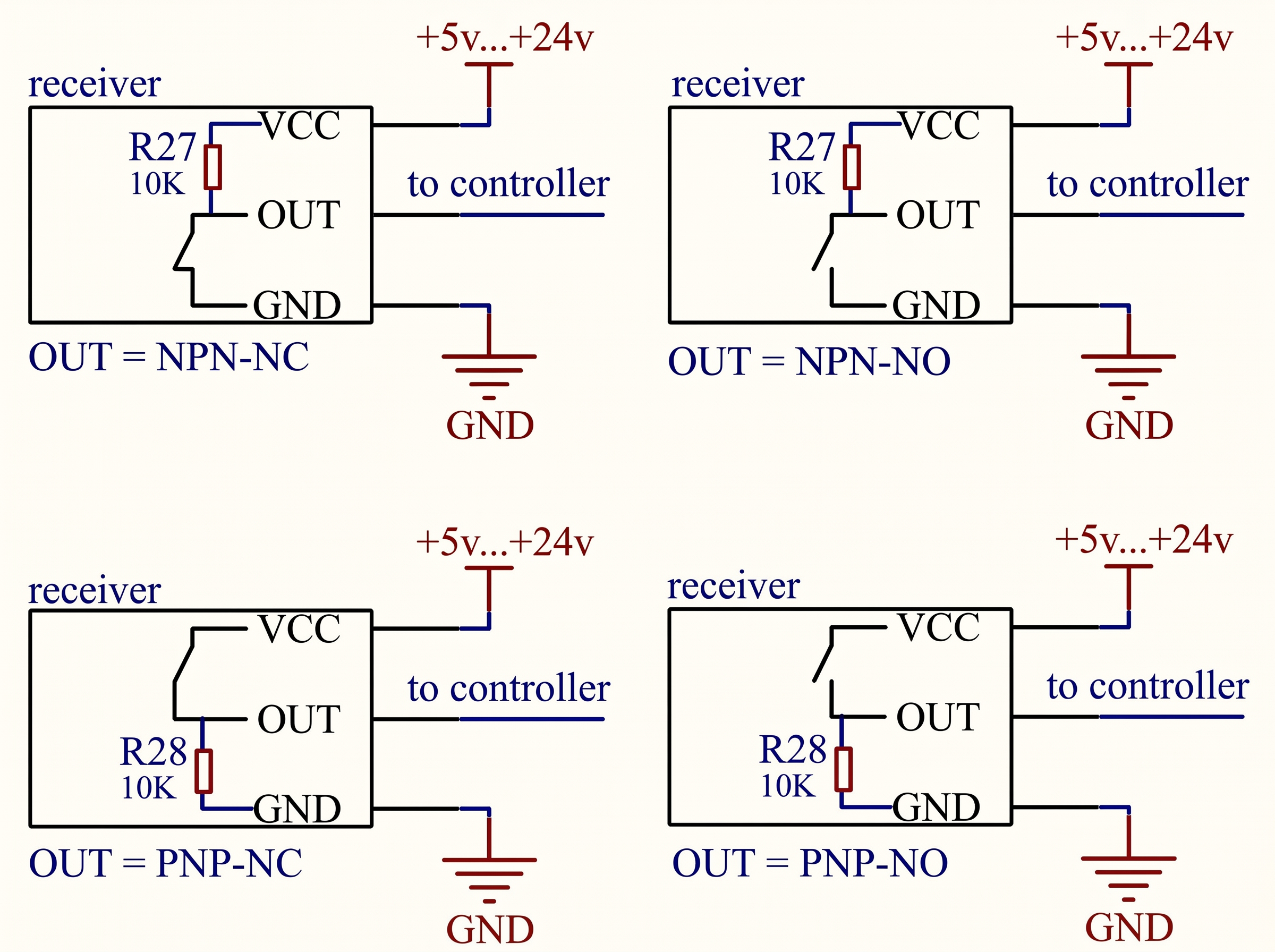
«NC NO» даёт возможность выбора между нормально-замкнутой NC (рекомендуется) и нормально-разомкнутой NO схемой подключения выхода к контроллеру.
«NPN PNP» даёт возможность выбора между npn и pnp схемой подключения выхода к контроллеру.
С помощью переключателей «NC NO» и «NPN PNP» можно выбрать одну из 4-х схем подключения выходов OUT и ERR к контроллеру (обратите внимание, контроллер может иметь свои ограничения по напряжению питания). В приемнике на выходах уже распаяны подтягивающие резисторы, см. схемы ниже.
«Вход "TS"» - служит для объединения датчика инструмента (TSm, WTSm или другого стороннего датчика NPN-NC или NC типа) с приемником Vers WLR на один общий выход "OUT" по логической схеме "ИЛИ", при которой допускается независимое отключение любого из датчиков (например, если WLR "ушел в сон", TSm останется в рабочем состоянии). TSm подключается к WLR как показано на схеме ниже и использует в данном случае источник питания от WLR, TSm также может использовать и собственный источник питания.
Кнопка "SERV" - если эта кнопка нажата в момент включения приемника, выполняется одна из двух сервисных процедур:
1. "Привязка ЦИ к приемнику", если ЦИ соединен с приемником TYPE-C кабелем.
2. Запись новых «Custom PARAMETERS», если ЦИ не соединен с приемником кабелем.
Привязка центроискателя (ЦИ) к приемнику
Приборы поставляются с уже выполненной процедурой привязки. Данная процедура нужна только для привязки приемника и ЦИ из разных комплектов.
- 1. Выключить приемник, ЦИ и все беспроводные устройства Vers, находящиеся в одном помещении.
- 2. Соединить комплектным TYPE-C кабелем привязываемые приемник и ЦИ.
- 3. Стирание flash-памяти: при зажатой кнопке "SERV" включить кнопкой ТОЛЬКО приемник, кнопка питания ЦИ при этом должна быть ВЫКЛЮЧЕНА, отпустить кнопку "SERV", 2 коротких сигнала зуммера уведомят об успешном стирании памяти. Выключить приемник. Отсоединить TYPE-C кабель. Память очистилась и в приёмнике, и в центроискателе.
- 4. Запись во flash-память сведений о новом партнере: включить приемник, 3 коротких сигнала зуммера уведомят о том, что память была стерта. Включить ЦИ. Приемник и ЦИ связываются без провода, автоматически обмениваются и сохраняют в постоянной памяти сведения о партнере при первом включении.
Custom PARAMETERS
Пользователь может изменить 3 двоичных параметра, записанных в энергонезависимой флэш-памяти.
| PARAMETER | Factory settings | Function |
|---|---|---|
| P1 | 1 | Инвертировать (1) или нет (0) состояние вывода OUT в случае перехода в спящий режим или выключения ЦИ. Этот параметр можно установить равным 1, если вы не планируете подключать датчик инструмента к входу TS, переход в режим сна или выключение щупа вызовет срабатывание контакта OUT. Если вы подключили датчик инструмента ко входу TS, то P1 должен быть = 0. |
| P2 | 1 | Инвертировать (1) или нет (0) состояние вывода ERR в случае перехода в спящий режим или выключения ЦИ. Рекомендуемое значение этого параметра = 1. |
| P3 | 1 | Быстрый (1) или медленный (0) поиск лучшего канала. Чем медленнее поиск, тем он точнее. С другой стороны, медленный поиск замедляет загрузку программы при запуске или пробуждении. Рекомендуемое значение этого параметра = 1. |
Чтобы изменить параметры:
- 1. Выключите приемник.
- 2. Не соединяйте приемник и ЦИ кабелем TYPE-C.
- 3. Установите DIP-переключатели 1,2,3 в нужные значения для параметров P1, P2, P3 соответственно.
- 4. Сохранение во флэш-память: удерживая кнопку "SERV", включить приёмник, отпустить кнопку "SERV", 4 коротких звуковых сигнала оповестят об успешном сохранении новых значений, а зеленые светодиоды на индикаторе укажут, какие параметры были изменены. На этом этапе сохраняются сразу все три параметра. Поэтому, если вы хотите изменить какой-либо 1 параметр, позаботьтесь о том, чтобы правильно установить два других. Выключите ресивер.
- 5. Верните микропереключатели 1,2,3 в желаемое положение для повседневного использования (sleep mode and pool mode).
Светодиодная индикация в центроискателе
Красный светодиод горит: нажат стилус;
Зеленый светодиод (короткий повторяющийся импульс): отпустили стилус;
Зеленый светодиод (постоянно горит или мигает 2 раза в секунду): нарушилась взаимосвязь с приемником, необходимо перезапустить (выкл.-вкл.) приемник, а затем центроискатель.
Синий светодиод горит: аккумулятор заряжается. При сильном разряде аккумулятора синий светодиод может включиться не сразу, пока система динамического контроля не восстановит заряд до безопасного минимального уровня. Синий светодиод погаснет, когда уровень заряда достигнет 80%.
Светодиодная индикация в приемнике
Линейка красных светодиодов горит: нажат стилус, количество соответствует уровню переданного радиосигнала;
Линейка зеленых светодиодов горит: отпустили стилус, количество соответствует уровню заряда батареи;
Голубой светодиод OUT горит: индикация состояния выхода OUT.
Красный светодиод ERR горит: индикация состояния выхода ERR.
Юстировка
Перед началом измерений необходимо произвести юстировку прибора. Прибор устанавливается в шпиндель, рядом фиксируется контрольный индикатор. Индикатор должен быть чувствителен к слабому воздействию 0.3-0.5Н (таким свойством, например, обладают большинство рычажных индикаторов). Рукой проворачивается ось шпинделя и по индикатору контролируется амплитуда отклонения шарика стилуса от оси вращения.

Отклонение устраняется поворотом регулировочных винтов M2.5 , винты углублены в отверстия, шестигранным ключом 2мм из комплекта. При регулировке применяется как затяжка, так и ослабление винтов. Ключ рекомендуется держать за короткий рычаг, чтобы не развить чрезмерное усилие. Потребуется провести несколько циклов проворот оси шпинделя—контроль--регулировка, чтобы добиться минимального, приемлемого для конкретного измерения, отклонения.
Использование
Радиоканал в Vers WLR имитирует нормально замкнутую связь между щупом и приемником. Обрыв радиоканала идентичен обрыву провода, с той лишь разницей, что реакция на обрыв канала на выходах OUT или ERR приходит с задержкой, равной pool period (не путать с задержкой реакции на нажатие стилуса ~1,5мс). На графике ниже показаны безопасные для поиска комбинации скорость-ускорение (область с зеленой штриховкой), при которых машина остановится не сломав стилус, даже в случае отказа радиосвязи на самом «неудачном» моменте, когда стилус коснулся детали. Учитывается свободный ход стилуса 7 мм и pool period 0.3 секунды.
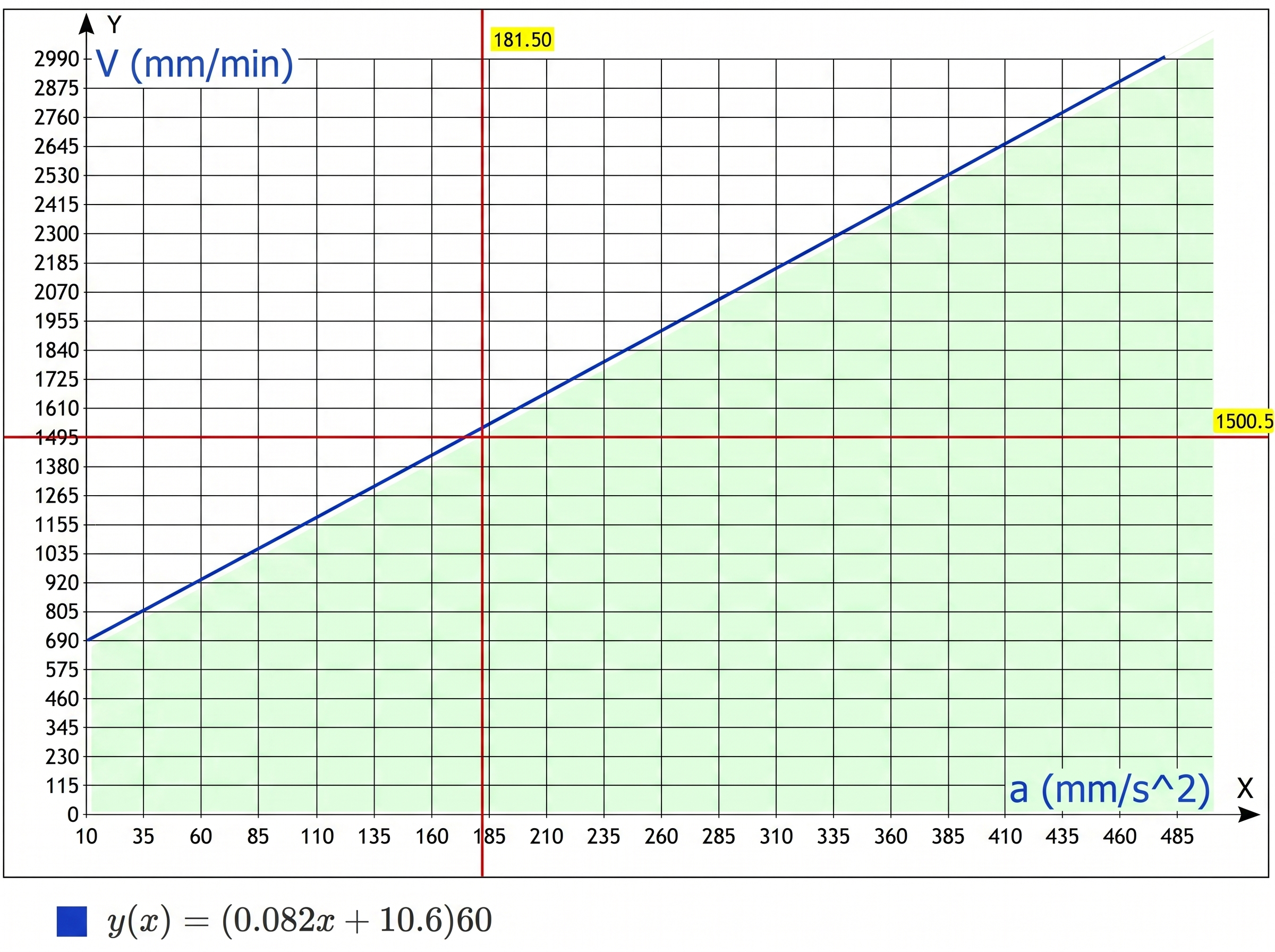
Формула выведена из начальных условий:
S = 4 мм — дистанция допустимого отклонения стилуса;
t = 0.33 с — максимальное время задержки обнаружения обрыва связи, спустя это время начинается торможение до полной остановки;
V — скорость поиска в мм/мин (ось Y на графике);
a — ускорение, заданное в настройках станка, в мм/с2 (ось X на графике).
(Формула, применяемая для расчетов: S = 2*V*t - a*(t2)/2)
Для удобной работы с датчиком в системе LinuxCNC, в свободном доступе находится программное обеспечение ProbeScreen, для работы в системе Mach3 — Probe Wizard.
play_arrow Купить